Back • Return Home

Automated Agriculture
&
Extending Plant Consciousness Through Technology
Introduction
Within another article, we pointed out a few resources that show how it is possible to make scientific equipment with recycled materials and to create a thriving garden with fewer inputs.
We also briefly noted that much of the starvation that occurs throughout the world is not actually caused from a lack of available food, but from inefficiency in how that food is distributed.
One way of remedying this situation is to use that knowledge to integrate recycling programs with food production on the local level. This will reduce pollution and waste, while simultaneously handling the problem of distribution of food, all on a low budget.
In other words, let's use the materials acquired from recycling to help build machinery that will allow for fully-automated agriculture!...What kind of machinery should we build then?
The Core Components
Rory Aronson has come up with an open-source project called "FarmBot". Essentially, it is a computer-controlled device attached to a track that can plant seeds, water them, etc. It is similar to things like "3-D printers" and "CNC machines" that use a computer to tell a tool where to move and what to do with great precision. Here is the original design document and the resources for its construction.
It is a beautiful system that can be easily extended. Here, we would like to offer a few ideas on how this might be done:
• The Plant-Controlled Computer Network
Plants can sense many things. Therefore, instead of relying on human input to the computer, a system can be designed where plants interface with the computer directly. For example, plants release chemicals (e.g.: "tannins") and produce electrical pulses in response to their environment. This is known as the "electrophysiology" of the plant.
These signals can be used to actuate various devices around the plants that care for them automatically. For example, the plant reads that it is getting too much sun? A shade attached to the surrounding track rolls out to shield them. The plant reads that it needs more water? Irrigation systems start and stop in response to the moisture readings of the surrounding air and soil.
In tandem with weather data, the conditions that will allow for optimal growth can always be provided for without a human having to set anything. As with most automated systems, humans only have to regularly observe them to make that sure that they are functioning properly, and periodically maintenance them to keep them from failing.
• "Pest"-Removal With Machine Learning
"Machine Learning" (or "ML" for short) is when a computer is used to generate a process for accomplishing a particular task by giving it a lot of data to work with, instead of a person writing out the instructions step-by-step (i.e.: "coding" or "programming").
ML is often used for "facial recognition". For example, given a lot of photos, ML can be "trained" to recognize which of these photos are pictures of faces. We can use the same proces on wildlife photography to get a computer to recognize the "pests" associated with specific types of plants.
These programs can be run on a small microcomputer in a weather-proof container. Motion sensors could activate outdoor cameras connected to this computer, and if the ML recognizes something approaching that would harm the plants, it uses the irrigation system like a "water gun" to scare them away whenever necessary.
• Weeding & Harvesting With "The Claw"
The same type of system that is used for recognizing "pests" can also be used to recognize weeds or when a plant is ripe.
A claw-like apparatus, similar to that within a "crane game", can then pick weeds when they are first forming or gather the parts of plants that are ready for harvest. "The claw chooses who will go and who will stay." ☺
Food Availability
If these sorts of tools are used within the context of a greenhouse, it can be set up to produce food year-round. And if the internal environment is well-regulated, then it should be possible to grow things that are not native to that climate. Therefore, gourmet ingredients do not have to be imported from other locations.
Transportation and cosmetic standards seem to be some of the biggest culprits when it comes to pollution and waste. The above approach removes the need for transporting food, but what about the other issue? This can only be resolved by individual discernment.
Standards are useful, but we must carefully differentiate between those that are necessary for safety and those which are simply cosmetic. Food doesn't have to look beautiful in order to be delicious and nutritious!
Scalablility
Working with a manufacturer of larger equipment (such as tractors, buses, planes, etc.), this system could easily be scaled to any size plot of land. However, on a small scale, all of it can be made by:
• Smelting / molding / cutting / welding scrap metal and plastic into machine parts
and
• Scavenging electronic components from "e-waste" to build the control mechanisms
If absolutely necessary, whatever cannot be used directly can be sold off to acquire whatever is needed.
Food For All
Our goal is to make sure that everyone is fed with the minimum amount of effort and expense. There is no lack of resources or knowledge, and these plans can serve everyone if they are not undermined by greed or apathy.
In general, it seems within humanity's best interest to move our food and utilties away from centralized control (by power-hungry individuals within government and corporations) as much as possible. This is not an issue of politics or economics, but one of safety: A "single point of failure" is dangerous for everyone. For example, if the power grid goes out, that includes all of the medical equipment that is running off of it.
To make our agriculture impervious to these risks, the above mentioned devices can run with the resources which make the most sense for that area (e.g.: solar panels, windmills, water wheels, tidal generators, geothermal power plants, etc.). In the same way that it does not make any sense to transport food to places where it can be easily grown, it does not make any sense to transmit power to places where it can be easily generated. Always try to produce things wherever they are needed and in the ways that work best with that specific environment.
Decentralized distribution of food can be done through the support of local agriculture and the planting of home gardens. Further, every city park can also be made into a community garden. The environment is already being tended to, so we might as well feed people through it too. The resources gathered can be shared with local food banks and farmer's markets. Instead of wasting energy on cultivating grass that is only decorative or genetically modifying crops to produce less while people are starving to death, let's make gardens that literally give us an endless supply of useful resources. Perennial plants and heirloom seeds keep giving and giving.
Again, all of this does not have to be difficult to implent. We have seen that literally every step of the process can be made fully automated!
"If It Is So Easy, Why Isn't It Already Being Done?"
Other than the "red tape" of various organizations, it is only the current agricultural practices which make it a labor-intensive endeavor. This might seem counter-intuitive. Hasn't agriculture only become better with the advances that have been made within agricultural science? In some ways, yes. In other ways, just the opposite. To give a simple example...
"Monoculture" (i.e.: the planting of only one type of crop) is used so that large machines (like "combine harvesters") can make this task easier. However, as stated before, this also leads to a systemic problem:
If a large number of the same type of plant is concentrated within a given area, the soils become depleted as all of the plants compete for the same nutrients. Chemical fertilizers are used in response, but these have the minimum of necessary minerals for plant health. They produce a sickly plant susceptible to diseases and insect infestation. Fungicides and pesticides are used to combat these problems, but poison the groundwater supply and kill off helpful creatures like butterflies, bees, ladybugs, and earthworms...All of these things are interconnected! The constructive aspects of Nature and human technology should NOT be at odds with one another.
The ways in which the soil and crop are managed can minimize the necessity of fertilizers and pesticides. The great thing about this system is that it can be used with polyculture (to take advantage of companion planting), mycorrhizal inoculation, contours, and other practices that work with the environment to make hearty plants.
Conclusion
This is just a general outline of the what and why. We will continue to add more information on the how as it is built.
Thank you for reading! ♥
Development Log
Entry #1: 20th of December, 2022
After some more research, I was excited to hear of several projects that others have already built that are similar in principle to aspects of the claw attachment and the irrigation "water gun" that I have described above...
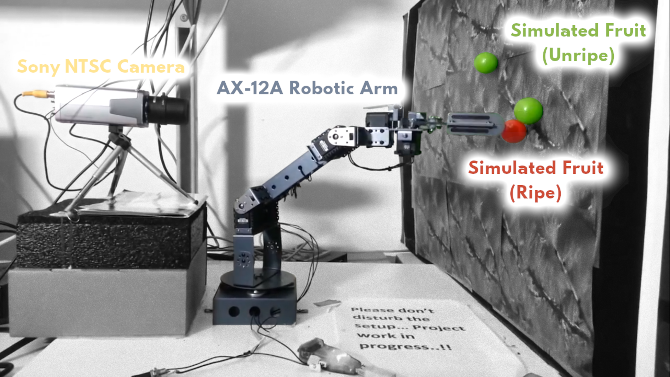
• There is the wonderful "PluckBot", a fruit picking robot made by Prashanth Mannar, Sagar Sidhpura, and Chithralekha Sivakumar (circa 2012). To quote the above video description (with slight editing):
The aim of the project is capturing the ripe fruits (substituted with red balls) by an AX-12A Robotic Arm. The Arm is controlled by a Intel Atom Processor on a Tunnel Creek Board. The Image captured by the Sony NTSC Camera is processed in real-time by a VxWorks System; a fruit and its ripeness is detected. If a ripe fruit is found, its coordinates are calculated and the same is sent to the Atom Processor via TCP/IP. Then, the Arm captures the fruit at the location it received from the VxWorks System.
Here is a screenshot with everything highlighted and labelled:
The technology used is a little dated now, but the overall concept is awesome!
How do we account for the depth of the tree? If the robotic arm was mounted onto a circular track around the tree's trunk, right underneath the canopy, it should be able to reach branches from different angles. Depending upon the type of tree and what is being harvested, perhaps a kind of tree-climbing robot would be better than a robotic arm? I keep envisioning something that has sloth-like appendages and movement so that it can hang underneath branches. This would allow for harvesting of hard to reach material on the ends of high branches.
I wonder if a changing amount of daylight filtered through moving leaves would produce an inconsistent lighting that would throw off the color-detection? Are there other ways of measuring ripeness that could be more effective, rather than tracking the fruit's changing color with a camera or a circuit? For example, perhaps a glucose sensor can be adapted to measure the increasing sugar levels within the fruit as it ripens, or a pressure sensor on the robot gripper itself could gently squeeze the fruit to gauge how firm it is. If it is soft enough, the fruit would then be gently twisted off and placed (not dropped!) into an attached collection bin, or maybe even a hopper and conveyor belt leading into a nearby storage container. To minimize movement, a tube beneath the gripper could catch the fruit as it is released.
Generally, harvesting from trees is a separate concern. To connect a robotic arm to the FarmBot, I imagine it hanging upside-down from the frame and picking at the plants growing in the ground from above. Hence, the "claw game" analogy. FarmBot's "universal tool mount" could be integrated into the robotic arm itself.
• In HackSpace Magazine's "Book of Making (Volume 1)", there is an article by Andy Clark that shows his clever "AI Robot Sentry" and gives a tutorial on how to make it. To quote:
Until now, garden sprinklers have been dumb pipes with predictable motion. Fun to play in, but not much of a challenge. This project gives the sprinkler a brain and vision so that it can target passing humans for a soaking they will never forget.
And this is what it looks like, "cunningly disguised as a flower":
I won't get into any of the details here as they are contained within the above document [available as a free download]. Like the previous device though, it has a great design that can be reconfigured for our purposes. For example, instead of using the facial recognition to detect humans, we can train it to detect "pests" (i.e.: insects and animals that could cause harm to the crop). Once spotted, it would spray water at them to scare them off. If necessary, instead of releasing water, it could also dispense OMRI substances for "pest control" or for plant nourishment. Perhaps cartridges with different liquids could even be interchanged with the water tank "on the fly"?
The nozzle could be fitted onto the robotic arm to give it a wider range of motion (depending upon how many "degrees of freedom" our robot arm has), or the entire contraption could sit adjacent to the FarmBot if the garden plot is small enough for it to oversee the entire area. It would be easy to detect larger creatures, but what about smaller ones? Would several cameras in close proximity to the plants be better? Or maybe two sets of cameras (e.g.: ones pointed towards the plants to detect their state and ones pointed away from the plants to see if anything is approaching them)? The outward-facing cameras really only have to detect motion. In that case, a simple motion detector or proximity sensor would probably work better than going through all of the effort of training a model to detect different kinds of animals.
Even if one is using "Rainwater Harvesting" (collecting rainwater for later use) and "Dry Farming" (growing plants appropriate to that climate), I am still concerned about conserving water. Maybe the flowrate of the nozzle could be changed dynamically with an electric valve, not only based upon the readings coming from the soil, the plants, and the surrounding atmosphere, but also a sensor in the water tank that determines how much is left? A high pressure, short burst to scare insects and animals. A low pressure, longer shower for watering plants.
• As for the network of sensors that keep tabs on the weather, soil, and other important characteristics, there is Eric Davisson's fantastic "MudPi" project. To share a couple of quotes from a very short article out of MagPi Magazine Issue #86 [October 2019]:
"MudPi is an automated garden system, built open-source, that helps me grow the produce I love with less time, resources, and effort," Eric explains. "The system controls the irrigation to the garden and takes sensor readings to determine growing conditions. Soil moisture, temperature, humidity, and rain data is all collected and used to manage watering control."
It's highly customizable and scalable as well, to suit your garden and changing requirements during its lifespan. And it all runs on a Raspberry Pi.
[...]
According to Eric, the project has been in development for just under two years and has already been a great solution to reduce the amount of time and water the garden needs. "Each year a new raised bed has been added and it was really easy to make another sensor unit to go along with it," he elaborates. "I spend less time having to water and weed the garden every year, which has been a joy. Not only does this work on my garden outside, but I have a grow shelf inside were another MudPi setup controls LED lights and small pumps. The benefit of the design is I can run a setup as minimal as a single temperature/humidity sensor for weather readings, all the way up to a setup with many attached units and components."
The FarmBot's "Farmduino" microcontroller receives instructions from a Raspberry Pi too, so it shouldn't be too difficult to connect the two systems together. However, I would make that computer "air-gapped" (i.e.: disconnected from the Internet and only controllable directly).
Now, how do we get the plants to operate that computer?...It sounds humourous stating it like that, but that is the ultimate goal: To interface the environment itself with the machine so that technology no longer undermines life. Abundance for all and harm to none!
It is interesting trying to find ways to get everything to mesh together harmoniously.

Entry #2: 3rd of July, 2023 [Updated 13th of November 2023]
This technology has to be integrated into a social system that will facilitate its constructive use. Elsewhere we have formulated a general plan to make cities sustainable by checking their excessive growth and redirecting their activities towards things that serve everyone and everything. What might this look like in practice?
Local homeless shelters, libraries, and other public institutions can offer people the opportunity to join trade schools or classes that teach machinist and agriculturalist skills. A publicly-owned machine shop could be created with recycled materials and used to build devices for generating energy and the equipment for gardening. In turn, these would be used to implement the program at multiple points throughout the city. In the more urban locations towards the inner city, food and fuel will be grown year-round in greenhouses created within unoccupied buildings, on the rooftops of homes and businesses, etc. Space will be maximized through "vertical farming", and their internal temperature will be kept warm throughout the winter by using extra organic waste to make hot compost piles within them or by building them with recycled insulation. In the more rural areas near the suburbs, native plants will be grown into "food forests" according to "permaculture" principles. We are aiming for a wide diversity of plant life (e.g.: we can get many different fruits from the exact same tree through grafting)...I wonder if it is possible to nurse a tree that produces healing fruit all year-round?
In summary: People within the program will get meals directly, surpluses can be shared with the local food bank, and so on. Again, the minimum ideal is to create the infrastructure for everyone within the city to at least have access to free food, while pollution/waste is minimized through recycling. Therefore, we will call this program "Food With Friends".
The maximum ideal is to also:
• Repair the environmental destruction caused by the industrialization within the city, and decrease urbanization by providing a place at its boundary for wildlife to thrive
• End starvation / malnutrition and homelessness throughout the community, creating an abundance of food and plant material for various uses
Entry #3: 4th of June, 2024
From Biosensors Monitor Plant Well-Being in Real Time (Feb. 11th, 2021 @ PhysOrg):
Researchers at Linköping University, Sweden, have developed biosensors that make it possible to monitor sugar levels in real time deep in the plant tissues - something that has previously been impossible. The information from the sensors may help agriculture to adapt production as the world faces climate change. The results have been published in the scientific journal iScience.
From Plant Bioelectronics and Biohybrids: The Growing Contribution of Organic Electronic and Carbon-Based Materials (Dec. 20th, 2021 @ Chemical Reviews)
Life in our planet is highly dependent on plants as they are the primary source of food, regulators of the atmosphere, and providers of a variety of materials. In this work, we review the progress on bioelectronic devices for plants and biohybrid systems based on plants, therefore discussing advancements that view plants either from a biological or a technological perspective, respectively. We give an overview on wearable and implantable bioelectronic devices for monitoring and modulating plant physiology that can be used as tools in basic plant science or find application in agriculture. Furthermore, we discuss plant-wearable devices for monitoring a plant's microenvironment that will enable optimization of growth conditions. The review then covers plant biohybrid systems where plants are an integral part of devices or are converted to devices upon functionalization with smart materials, including self-organized electronics, plant nanobionics, and energy applications. The review focuses on advancements based on organic electronic and carbon-based materials and discusses opportunities, challenges, as well as future steps.
From Timber! The World's First Wooden Transistor (Apr. 29th, 2023 @ IEEE Spectrum):
Transistors inside modern computer chips are several nanometers across, and switch on and off at hundreds of gigahertz. Organic electrochemical transistors, made for biodegradable applications, are milimeters in size and switch at kilohertz rates. The world's first wooden transistor, made by a collaboration of researchers through the Wallenberg Wood Science Center and reported this week in Publications of the National Academy of Sciences, is 3 centimeters across and switches at less than one hertz. While it may not be powering any wood-based supercomputers anytime soon, it does hold out promise for specialized applications including biodegradable computing and implanting into living plant material.